- 科研进展
-
杨会君教授团队在基于多传感器融合的3D激光SLAM大规模场景实时重建方法研究取得新进展
作者:张松 潘慧敏 来源: 发布日期:2024-06-14 浏览次数:近日,西北农林科技大学杨会君教授团队在基于多传感器融合的3D激光SLAM大规模场景实时重建方法研究取得新进展,研究成果以《LiDAR-IMU Tightly-Coupled SLAM Method Basedon IEKF and Loop Closure Detection》为题发表于国际权威刊物《 IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing》(中科院2区TOP)。西北农林科技大学潘慧敏硕士为第一作者,杨会君教授为通讯作者,西北农林科技大学为第一单位,深圳市农业科技促进中心为第二单位。
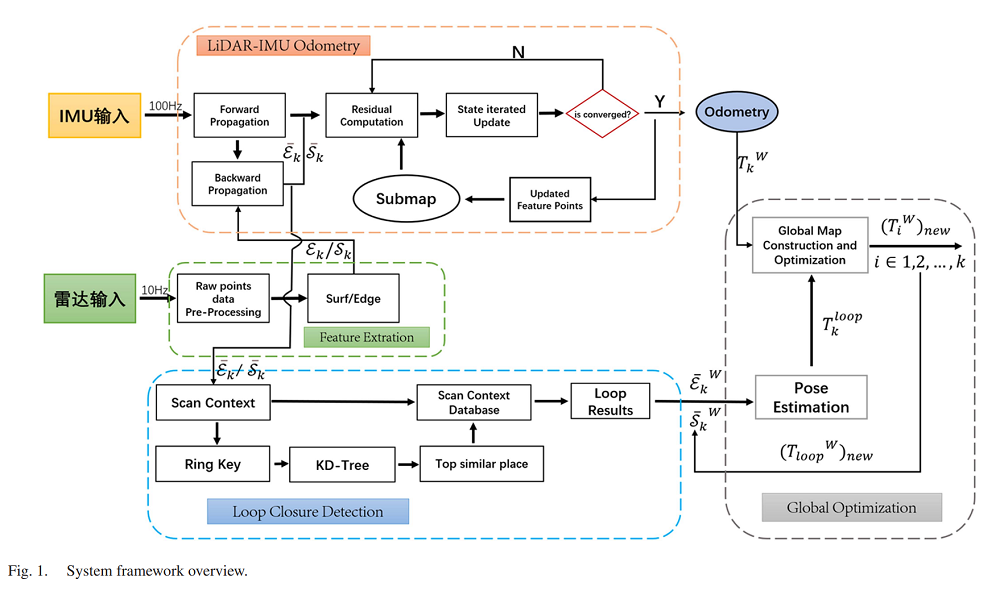
基于激光雷达的同步定位与测绘(SLAM)技术可以实现机器人在未知环境下的实时定位和建立环境地图。激光雷达测程可以在短距离或小尺度环境下实现准确的姿态估计,但精度会随着误差的积累而降低。同时,在结构特征不足的场景下,基于点云的LiDAR SLAM会出现退化现象,导致定位和制图失败。
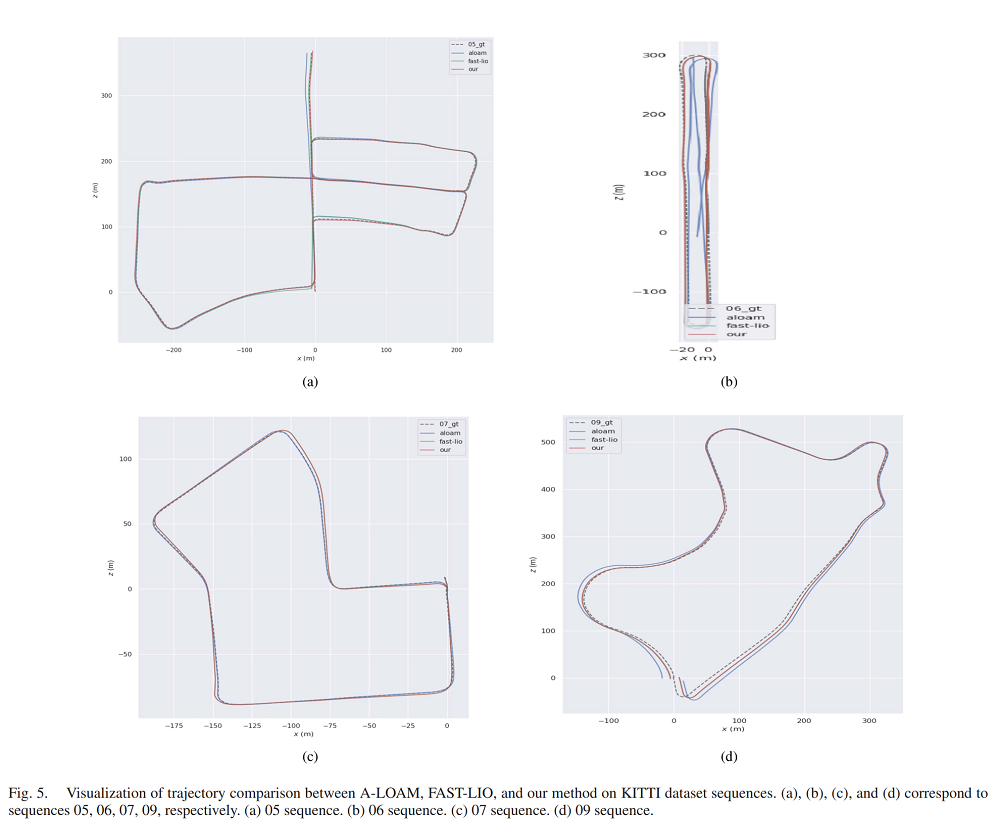
该成果提出了一种基于激光雷达(VLP-16)关键特征和惯性测量单元(N100 9轴IMU)紧耦合的定位方法,并提出加强平面特征点空间约束的特征提取方案,利用局部相邻点云计算曲率以提取激光雷达特征点。与传统的仅利用单一激光雷达的SLAM方法相比,融合多个传感器采集的数据可以弥补单一传感器的不足,进而提高定位和建图的精确性。在KITTI公共数据集4个序列上进行了轨迹精度实验,并利用绝对轨迹误差(ATE)和相对位姿误差(RPE)进行评价,结果表明该成果的轨迹误差较小,与基准框架FAST-LIO2相比轨迹误差精度平均降低15%,能够有效提升定位轨迹精度。
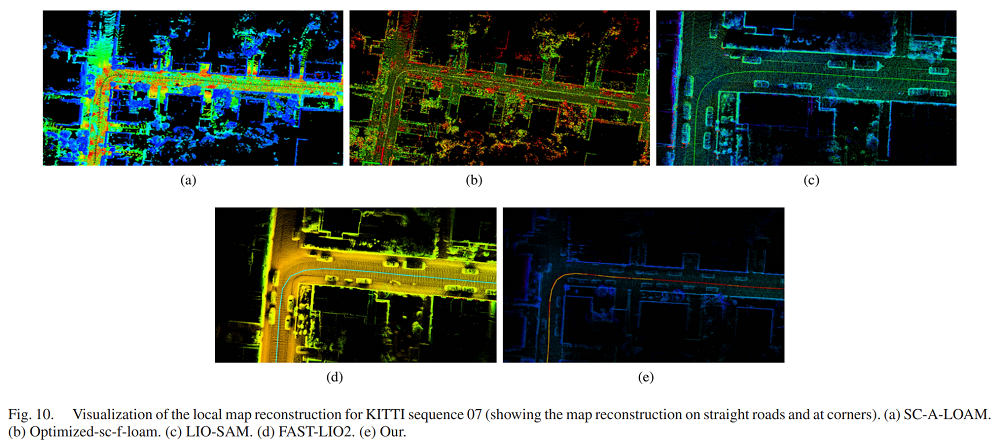
该成果提出了一种基于HISC全局描述子的环路闭合检测方法。传统的闭环检测方法只要考虑几何信息或者只考虑强度信息,信息单一。为全面的表示点云特性,该成果同时考虑了以上两种信息,并利用前端IMU的去畸变特征点构建新的HISC扫描上下文全局描述子。在KITTI公共数据集4个序列上与传统的两种方法对比了ATE和RPE的均方根误差,结果表明HISC方法得到的轨迹误差最低,且在与SC-ALOAM算法的时间性能评价实验中,该成果的平均耗时减少了约50%。同时在自建校园室内外数据集上进行了三维点云建图结果对比,该成果构建的地图边界清晰,没有严重的重影现象,实现了在保证构建地图全局一致性的同时提高了制图精度和鲁棒性。
本研究得到陕西省重点研发计划基金(2023-YBNY-229和2024NC–YBXM- 197)的资助。
原文链接:https://ieeexplore.ieee.org/document/10430368